Session 7
Minimum Cost Spanning Tree
This session is about building a minimum cost spanning tree from a connected, undirected weighted graph. A spanning tree connects all vertices without forming a cycle, and the minimum cost spanning tree chooses the set of edges whose total weight is as small as possible.
Objectives
- Understand the minimum cost spanning tree problem.
- Implement Prim's algorithm and Kruskal's algorithm.
- Compare both algorithms on different graph instances.
Concept
A spanning tree connects all vertices of a connected, undirected graph without cycles. A minimum cost spanning tree chooses the set of edges with the lowest possible total weight.
Prim's Algorithm
Prim's algorithm grows one tree. It starts from any vertex and repeatedly adds the minimum-weight edge that connects a visited vertex to an unvisited vertex.
Kruskal's Algorithm
Kruskal's algorithm sorts all edges by weight and repeatedly picks the smallest edge that does not form a cycle.
Question 1
Problem Statement
Implement Prim's algorithm to find a minimum cost spanning tree(MCST) in the given graph. Show all the processes.
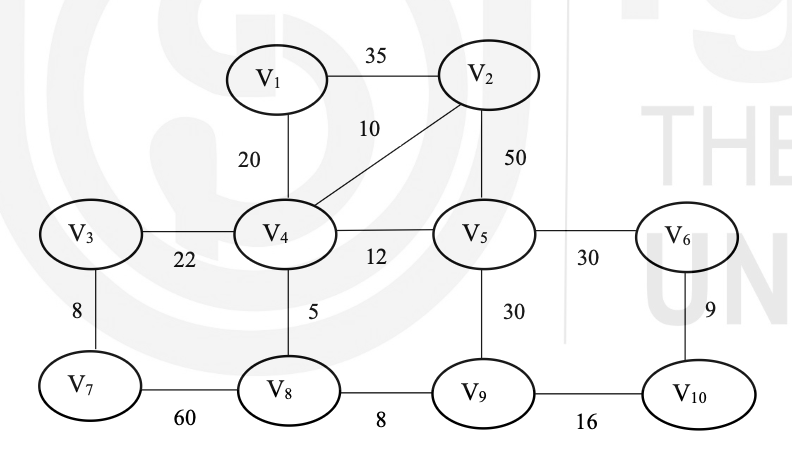
Explanation / Approach
Start from any vertex and repeatedly choose the minimum-weight edge that connects the current tree to an unvisited vertex. Keep a table of selected edges and running total cost.
Algorithm
Prim's algorithm is a greedy algorithm that builds the MST incrementally:
- Start with an arbitrary vertex and add it to the MST set.
- Maintain a
keyarray storing the minimum weight edge connecting each vertex to the current MST. - Repeatedly select the vertex with the smallest
keynot yet in MST. - Add the connecting edge to MST, update keys of adjacent vertices.
- Repeat until all vertices are included.
Space & Time Complexity
Space Complexity: O(V + E) Time Complexity: O(E log V) with priority queue, O(V²) with array scan.
Execution Steps
| Step | Added | Edge | Weight | Cumulative Cost | MST Edges |
|---|---|---|---|---|---|
| 0 | V1 | - | 0 | 0 | {} |
| 1 | V4 | V1-V4 | 20 | 20 | V1-V4 |
| 2 | V8 | V4-V8 | 5 | 25 | V1-V4, V4-V8 |
| 3 | V9 | V8-V9 | 8 | 33 | V1-V4, V4-V8, V8-V9 |
| 4 | V2 | V4-V2 | 10 | 43 | V1-V4, V4-V8, V8-V9, V4-V2 |
| 5 | V5 | V4-V5 | 12 | 55 | V1-V4, V4-V8, V8-V9, V4-V2, V4-V5 |
| 6 | V10 | V9-V10 | 16 | 71 | V1-V4, V4-V8, V8-V9, V4-V2, V4-V5, V9-V10 |
| 7 | V6 | V10-V6 | 9 | 80 | V1-V4, V4-V8, V8-V9, V4-V2, V4-V5, V9-V10, V10-V6 |
| 8 | V3 | V4-V3 | 22 | 102 | V1-V4, V4-V8, V8-V9, V4-V2, V4-V5, V9-V10, V10-V6, V4-V3 |
| 9 | V7 | V3-V7 | 8 | 110 | V1-V4, V4-V8, V8-V9, V4-V2, V4-V5, V9-V10, V10-V6, V4-V3, V3-V7 |
Final MCST Cost: 110
MST Edges: V1 -> V4 -> V8 -> V9 -> V2 -> V5 -> V10 -> V6 -> V3 -> V7
Implementation
Python
# Prim's Algorithm for Minimum Cost Spanning Tree
import heapq
class PrimsAlgorithm:
def __init__(self):
# Adjacency list: vertex -> [(neighbor, weight), ...]
self.graph = {}
def add_edge(self, u, v, w):
"""Add undirected edge between u and v with weight w"""
self.graph.setdefault(u, []).append((v, w))
self.graph.setdefault(v, []).append((u, w))
def prim(self, start_vertex):
"""
Execute Prim's algorithm from start_vertex.
Returns: mst_edges, total_cost, step_by_step_log
"""
mst_edges = []
total_cost = 0
visited = set()
# Min-heap stores: (weight, from_vertex, to_vertex)
heap = [(0, None, start_vertex)]
steps = []
print(f"\n{'=' * 70}")
print(f"PRIM'S ALGORITHM - Starting Vertex: {start_vertex}")
print(f"{'=' * 70}")
print(
f"{'Step':<4} | {'Added':<5} | {'Edge':<8} | {'Weight':<6} | {'Cumulative Cost':<15} | {'MST Edges'}"
)
print(f"{'-' * 70}")
while heap and len(visited) < len(self.graph):
weight, frm, to = heapq.heappop(heap)
# Skip if already included in MST
if to in visited:
continue
visited.add(to)
if frm is not None:
mst_edges.append((frm, to, weight))
total_cost += weight
# Log this step
step_info = {
"step": len(steps) + 1,
"added": to,
"edge": f"{frm}-{to}",
"weight": weight,
"cost": total_cost,
"edges": list(mst_edges),
}
steps.append(step_info)
# Print formatted row
edge_str = ", ".join([f"{u}-{v}" for u, v, _ in mst_edges])
print(
f"{step_info['step']:<4} | {to:<5} | {step_info['edge']:<8} | {weight:<6} | {total_cost:<15} | {edge_str}"
)
# Explore neighbors
for neighbor, w in self.graph.get(to, []):
if neighbor not in visited:
heapq.heappush(heap, (w, to, neighbor))
print(f"\n{'=' * 70}")
print(f"TOTAL MINIMUM COST: {total_cost}")
print(f"{'=' * 70}")
return mst_edges, total_cost, steps
def main():
prims = PrimsAlgorithm()
# Build the exact graph from the problem image
edges = [
("V1", "V2", 35),
("V1", "V4", 20),
("V2", "V4", 10),
("V2", "V5", 50),
("V3", "V4", 22),
("V3", "V7", 8),
("V4", "V5", 12),
("V4", "V8", 5),
("V5", "V6", 30),
("V5", "V9", 30),
("V6", "V10", 9),
("V7", "V8", 60),
("V8", "V9", 8),
("V9", "V10", 16),
]
for u, v, w in edges:
prims.add_edge(u, v, w)
# Run Prim's starting from V1
prims.prim("V1")
if __name__ == "__main__":
main()
C Language
/*
* Prim's Algorithm for Minimum Cost Spanning Tree
*/
#include <stdio.h>
#include <limits.h>
#include <stdbool.h>
#define V 10 // Number of vertices
#define INF INT_MAX
// Map index 0-9 to V1-V10
const char* vertexNames[] = {"V1","V2","V3","V4","V5","V6","V7","V8","V9","V10"};
// Find vertex with minimum key value not yet in MST
int minKey(int key[], bool mstSet[]) {
int min = INF, min_index = -1;
for (int v = 0; v < V; v++) {
if (!mstSet[v] && key[v] < min) {
min = key[v];
min_index = v;
}
}
return min_index;
}
// Print MST construction steps
void printMST(int parent[], int graph[V][V]) {
int totalCost = 0;
printf("\n%-4s | %-5s | %-8s | %-6s | %-15s | %s\n",
"Step", "Added", "Edge", "Weight", "Cumulative Cost", "MST Edges");
printf("----------------------------------------------------------------------\n");
for (int i = 1; i < V; i++) {
int weight = graph[parent[i]][i];
totalCost += weight;
printf("%-4d | %-5s | %-8s | %-6d | %-15d | ",
i, vertexNames[i],
(parent[i] != -1) ? "" : "Root",
weight, totalCost);
// Print edges built so far
for (int j = 1; j <= i; j++) {
if (parent[j] != -1) {
printf("%s-%s ", vertexNames[parent[j]], vertexNames[j]);
}
}
printf("\n");
}
printf("\nTOTAL MINIMUM COST: %d\n", totalCost);
}
// Prim's algorithm implementation
void primMST(int graph[V][V]) {
int parent[V]; // Stores MST structure
int key[V]; // Key values to pick minimum weight edge
bool mstSet[V]; // True if vertex is included in MST
// Initialize all keys as INFINITE, mstSet as false
for (int i = 0; i < V; i++) {
key[i] = INF;
mstSet[i] = false;
parent[i] = -1;
}
// Start from vertex 0 (V1)
key[0] = 0;
printf("\n======================================================================\n");
printf("PRIM'S ALGORITHM - Starting Vertex: V1\n");
printf("======================================================================\n");
// MST will have V vertices
for (int count = 0; count < V - 1; count++) {
int u = minKey(key, mstSet);
mstSet[u] = true;
// Update key values of adjacent vertices
for (int v = 0; v < V; v++) {
// graph[u][v] != 0 means edge exists
// mstSet[v] == false means v not in MST
// graph[u][v] < key[v] means new shorter path found
if (graph[u][v] && !mstSet[v] && graph[u][v] < key[v]) {
parent[v] = u;
key[v] = graph[u][v];
}
}
}
printMST(parent, graph);
}
int main() {
// Adjacency matrix representation of the graph
// 0 represents no direct edge
int graph[V][V] = {
{0, 35, 0, 20, 0, 0, 0, 0, 0, 0}, // V1
{35, 0, 0, 10, 50, 0, 0, 0, 0, 0}, // V2
{0, 0, 0, 22, 0, 0, 8, 0, 0, 0}, // V3
{20, 10, 22, 0, 12, 0, 0, 5, 0, 0},// V4
{0, 50, 0, 12, 0, 30, 0, 0, 30, 0},// V5
{0, 0, 0, 0, 30, 0, 0, 0, 0, 9}, // V6
{0, 0, 8, 0, 0, 0, 0, 60, 0, 0}, // V7
{0, 0, 0, 5, 0, 0, 60, 0, 8, 0}, // V8
{0, 0, 0, 0, 30, 0, 0, 8, 0, 16}, // V9
{0, 0, 0, 0, 0, 9, 0, 0, 16, 0} // V10
};
primMST(graph);
return 0;
}
Rust
// Prim's Algorithm for Minimum Cost Spanning Tree
use std::cmp::Ordering;
use std::collections::{BinaryHeap, HashMap, HashSet};
// Structure for priority queue items
#[derive(Debug, Eq, PartialEq)]
struct QueueItem {
weight: i32,
from: String,
to: String,
}
// Implement min-heap ordering
impl Ord for QueueItem {
fn cmp(&self, other: &Self) -> Ordering {
other
.weight
.cmp(&self.weight)
.then_with(|| self.to.cmp(&other.to))
}
}
impl PartialOrd for QueueItem {
fn partial_cmp(&self, other: &Self) -> Option<Ordering> {
Some(self.cmp(other))
}
}
struct PrimsAlgorithm {
adjacency_list: HashMap<String, Vec<(String, i32)>>,
}
impl PrimsAlgorithm {
fn new() -> Self {
PrimsAlgorithm {
adjacency_list: HashMap::new(),
}
}
fn add_edge(&mut self, u: &str, v: &str, w: i32) {
self.adjacency_list
.entry(u.to_string())
.or_default()
.push((v.to_string(), w));
self.adjacency_list
.entry(v.to_string())
.or_default()
.push((u.to_string(), w));
}
fn run(&self, start: &str) {
let mut mst_edges = Vec::new();
let mut total_cost = 0;
let mut visited = HashSet::new();
let mut heap = BinaryHeap::new();
heap.push(QueueItem {
weight: 0,
from: "Root".to_string(),
to: start.to_string(),
});
println!("\n{}", "=".repeat(70));
println!("PRIM'S ALGORITHM - Starting Vertex: {}", start);
println!("{}", "=".repeat(70));
println!(
"{:<4} | {:<5} | {:<8} | {:<6} | {:<15} | {}",
"Step", "Added", "Edge", "Weight", "Cumulative Cost", "MST Edges"
);
println!("{}", "-".repeat(70));
let mut step = 0;
while let Some(item) = heap.pop() {
if visited.contains(&item.to) {
continue;
}
visited.insert(item.to.clone());
if item.from != "Root" {
mst_edges.push((item.from.clone(), item.to.clone(), item.weight));
total_cost += item.weight;
step += 1;
let edge_str: Vec<String> = mst_edges
.iter()
.map(|(u, v, _)| format!("{}-{}", u, v))
.collect();
println!(
"{:<4} | {:<5} | {:<8} | {:<6} | {:<15} | {}",
step,
item.to,
format!("{}-{}", item.from, item.to),
item.weight,
total_cost,
edge_str.join(" ")
);
}
if let Some(neighbors) = self.adjacency_list.get(&item.to) {
for (neighbor, weight) in neighbors {
if !visited.contains(neighbor) {
heap.push(QueueItem {
weight: *weight,
from: item.to.clone(),
to: neighbor.clone(),
});
}
}
}
}
println!("\n{}", "=".repeat(70));
println!("TOTAL MINIMUM COST: {}", total_cost);
println!("{}", "=".repeat(70));
}
}
fn main() {
let mut prim = PrimsAlgorithm::new();
let edges = [
("V1", "V2", 35),
("V1", "V4", 20),
("V2", "V4", 10),
("V2", "V5", 50),
("V3", "V4", 22),
("V3", "V7", 8),
("V4", "V5", 12),
("V4", "V8", 5),
("V5", "V6", 30),
("V5", "V9", 30),
("V6", "V10", 9),
("V7", "V8", 60),
("V8", "V9", 8),
("V9", "V10", 16),
];
for &(u, v, w) in &edges {
prim.add_edge(u, v, w);
}
prim.run("V1");
}
Question 2
Problem Statement
Implement Kruskal's algorithm to find a minimum cost spanning tree for the given graph. Show all the processes.
Explanation
Kruskal’s algorithm is a classic greedy algorithm used to discover an MCST. It focuses directly on the edges of the graph. The algorithm operates by selecting the absolute shortest edges from anywhere in the graph, one by one, and placing them into a growing forest.
The Greedy Choice Strategy:
- Maintain a set of edges that form a forest (where each vertex starts as its own tree).
- Sort all edges in the graph in ascending order of their weights.
- Iterate through the sorted edges and pick the smallest edge.
- Check if adding this edge forms a cycle with the edges already selected.
- If no cycle is formed, include this edge in the MCST.
- If a cycle is formed, discard it.
- Terminate when the MCST contains exactly
V - 1edges (whereVis the total number of vertices).
Cycle Detection via Disjoint-Set (Union-Find)
To efficiently check for cycles, the Disjoint-Set Data Structure is utilized.
Find: Determines which subset a particular element belongs to. If two vertices share the same subset root, connecting them will create a cycle.
Union: Joins two distinct subsets into a single subset when a valid edge is added.
Complexity Analysis
- Time Complexity:
O(Elog(E))orO(Elog(V)), whereEis the number of edges andVis the number of vertices. Sorting the edges dominates the computational execution time. - Space Complexity:
O(V + E)to maintain the graph data structures and the tracking arrays (parentandrank) for Union-Find operations.
Implementation
Python
class Graph:
def __init__(self, vertices):
self.V = vertices # Total count of nodes
self.graph = [] # Default storage array for data streams
def add_edge(self, u, v, w):
"""Append an un-directed edge configuration containing weight"""
self.graph.append([u, v, w])
def find(self, parent, i):
"""Find the root element of element i with path compression technique"""
if parent[i] == i:
return i
return self.find(parent, parent[i])
def union(self, parent, rank, x, y):
"""Perform union of two sets using rank optimization"""
xroot = self.find(parent, x)
yroot = self.find(parent, y)
if rank[xroot] < rank[yroot]:
parent[xroot] = yroot
elif rank[xroot] > rank[yroot]:
parent[yroot] = xroot
else:
parent[yroot] = xroot
rank[xroot] += 1
def kruskal_mcst(self):
result = [] # Stores the final built tree
i, e = (
0,
0,
) # i: tracking index for sorted edges, e: tracking count for MCST edges
# Step 1: Sort all edges in non-decreasing order of weight
self.graph = sorted(self.graph, key=lambda item: item[2])
parent = []
rank = []
# Create V individual subset components
for node in range(self.V):
parent.append(node)
rank.append(0)
# Process elements until the tree contains exactly V-1 components
while e < self.V - 1:
u, v, w = self.graph[i]
i = i + 1
x = self.find(parent, u)
y = self.find(parent, v)
# If roots are distinct, no cycle is formed. Accept edge.
if x != y:
e = e + 1
result.append([u, v, w])
self.union(parent, rank, x, y)
# Print out compiled outputs
minimum_cost = 0
print("Edges in the constructed MCST (Python Implementation):")
for u, v, weight in result:
minimum_cost += weight
print(f"V{u + 1} -- V{v + 1} == {weight}")
print(f"Minimum Spanning Tree Cost: {minimum_cost}")
# Driver execution matching our graph data schema
if __name__ == "__main__":
g = Graph(10)
g.add_edge(0, 1, 35) # V1-V2
g.add_edge(0, 3, 20) # V1-V4
g.add_edge(1, 3, 10) # V2-V4
g.add_edge(1, 4, 50) # V2-V5
g.add_edge(2, 3, 22) # V3-V4
g.add_edge(2, 6, 8) # V3-V7
g.add_edge(3, 4, 12) # V4-V5
g.add_edge(3, 7, 5) # V4-V8
g.add_edge(4, 5, 30) # V5-V6
g.add_edge(4, 8, 30) # V5-V9
g.add_edge(5, 9, 9) # V6-V10
g.add_edge(6, 7, 60) # V7-V8
g.add_edge(7, 8, 8) # V8-V9
g.add_edge(8, 9, 16) # V9-V10
g.kruskal_mcst()
C Language
#include <stdio.h>
#include <stdlib.h>
// Structure to represent a weighted edge in the graph
struct Edge {
int src, dest, weight;
};
// Structure to represent a connected, undirected, and weighted graph
struct Graph {
int V, E;
struct Edge* edge;
};
// Structure to represent a subset for union-find
struct Subset {
int parent;
int rank;
};
// Function to create a graph with V vertices and E edges
struct Graph* createGraph(int V, int E) {
struct Graph* graph = (struct Graph*) malloc(sizeof(struct Graph));
graph->V = V;
graph->E = E;
graph->edge = (struct Edge*) malloc(graph->E * sizeof(struct Edge));
return graph;
}
// A utility function to find set of an element i (uses path compression technique)
int find(struct Subset subsets[], int i) {
if (subsets[i].parent != i)
subsets[i].parent = find(subsets, subsets[i].parent);
return subsets[i].parent;
}
// A function that does union of two sets of u and v (uses union by rank)
void Union(struct Subset subsets[], int x, int y) {
int xroot = find(subsets, x);
int yroot = find(subsets, y);
if (subsets[xroot].rank < subsets[yroot].rank)
subsets[xroot].parent = yroot;
else if (subsets[xroot].rank > subsets[yroot].rank)
subsets[yroot].parent = xroot;
else {
subsets[yroot].parent = xroot;
subsets[xroot].rank++;
}
}
// Comparator function used by qsort to sort edges based on their weight
int myComp(const void* a, const void* b) {
struct Edge* a1 = (struct Edge*)a;
struct Edge* b1 = (struct Edge*)b;
return a1->weight - b1->weight;
}
// The main function to construct MCST using Kruskal's algorithm
void KruskalMCST(struct Graph* graph) {
int V = graph->V;
struct Edge result[V]; // Stores the final constructed MCST edges
int e = 0; // Index variable used for result[]
int i = 0; // Index variable used for sorted edges
// Step 1: Sort all the edges in non-decreasing order of their weight
qsort(graph->edge, graph->E, sizeof(graph->edge[0]), myComp);
// Allocate memory for creating V subsets
struct Subset* subsets = (struct Subset*) malloc(V * sizeof(struct Subset));
// Initialize V subsets with single elements
for (int v = 0; v < V; ++v) {
subsets[v].parent = v;
subsets[v].rank = 0;
}
// Number of edges to be taken is equal to V-1
while (e < V - 1 && i < graph->E) {
// Step 2: Pick the smallest edge. Check if it forms a cycle
struct Edge next_edge = graph->edge[i++];
int x = find(subsets, next_edge.src);
int y = find(subsets, next_edge.dest);
// If including this edge doesn't cause a cycle, include it in result
if (x != y) {
result[e++] = next_edge;
Union(subsets, x, y);
}
}
// Print the contents of result[] to display the built MCST
int minimumCost = 0;
printf("Edges in the constructed MCST (C Implementation):\n");
for (i = 0; i < e; ++i) {
printf("V%d -- V%d == %d\n", result[i].src + 1, result[i].dest + 1, result[i].weight);
minimumCost += result[i].weight;
}
printf("Minimum Spanning Tree Cost: %d\n", minimumCost);
free(subsets);
}
int main() {
int V = 10; // Number of vertices in graph
int E = 14; // Number of edges in graph
struct Graph* graph = createGraph(V, E);
// Adding edges matching the problem image data (0-indexed adjustment: V1 -> 0, V2 -> 1...)
graph->edge[0].src = 0; graph->edge[0].dest = 1; graph->edge[0].weight = 35; // V1-V2
graph->edge[1].src = 0; graph->edge[1].dest = 3; graph->edge[1].weight = 20; // V1-V4
graph->edge[2].src = 1; graph->edge[2].dest = 3; graph->edge[2].weight = 10; // V2-V4
graph->edge[3].src = 1; graph->edge[3].dest = 4; graph->edge[3].weight = 50; // V2-V5
graph->edge[4].src = 2; graph->edge[4].dest = 3; graph->edge[4].weight = 22; // V3-V4
graph->edge[5].src = 2; graph->edge[5].dest = 6; graph->edge[5].weight = 8; // V3-V7
graph->edge[6].src = 3; graph->edge[6].dest = 4; graph->edge[6].weight = 12; // V4-V5
graph->edge[7].src = 3; graph->edge[7].dest = 7; graph->edge[7].weight = 5; // V4-V8
graph->edge[8].src = 4; graph->edge[8].dest = 5; graph->edge[8].weight = 30; // V5-V6
graph->edge[9].src = 4; graph->edge[9].dest = 8; graph->edge[9].weight = 30; // V5-V9
graph->edge[10].src = 5; graph->edge[10].dest = 9; graph->edge[10].weight = 9; // V6-V10
graph->edge[11].src = 6; graph->edge[11].dest = 7; graph->edge[11].weight = 60;// V7-V8
graph->edge[12].src = 7; graph->edge[12].dest = 8; graph->edge[12].weight = 8; // V8-V9
graph->edge[13].src = 8; graph->edge[13].dest = 9; graph->edge[13].weight = 16; // V9-V10
KruskalMCST(graph);
free(graph->edge);
free(graph);
return 0;
}
Rust
// Structure representing an edge
#[derive(Debug, Clone, Copy)]
struct Edge {
src: usize,
dest: usize,
weight: i32,
}
// Structure representing the Disjoint-Set (Union-Find)
struct DisjointSet {
parent: Vec<usize>,
rank: Vec<usize>,
}
impl DisjointSet {
// Initialize standard subsets
fn new(n: usize) -> Self {
let parent = (0..n).collect();
let rank = vec![0; n];
DisjointSet { parent, rank }
}
// Find root using path compression technique
fn find(&mut self, i: usize) -> usize {
if self.parent[i] != i {
self.parent[i] = self.find(self.parent[i]);
}
self.parent[i]
}
// Unify two sets by structural rank
fn union(&mut self, x: usize, y: usize) {
let xroot = self.find(x);
let yroot = self.find(y);
if self.rank[xroot] < self.rank[yroot] {
self.parent[xroot] = yroot;
} else if self.rank[xroot] > self.rank[yroot] {
self.parent[yroot] = xroot;
} else {
self.parent[yroot] = xroot;
self.rank[xroot] += 1;
}
}
}
fn kruskal_mcst(vertices: usize, mut edges: Vec<Edge>) {
let mut result = Vec::new();
let mut ds = DisjointSet::new(vertices);
// Step 1: Sort edges in non-decreasing order of weight
edges.sort_by_key(|edge| edge.weight);
// Step 2: Iterate over sorted edges
for edge in edges {
let x = ds.find(edge.src);
let y = ds.find(edge.dest);
// If roots are distinct, it means adding this edge will not form a cycle
if x != y {
result.push(edge);
ds.union(x, y);
}
// Optimization: Stop if we've successfully selected V - 1 edges
if result.len() == vertices - 1 {
break;
}
}
// Display execution details
let mut minimum_cost = 0;
println!("Edges in the constructed MCST (Rust Implementation):");
for edge in result {
println!("V{} -- V{} == {}", edge.src + 1, edge.dest + 1, edge.weight);
minimum_cost += edge.weight;
}
println!("Minimum Spanning Tree Cost: {}", minimum_cost);
}
fn main() {
let vertices = 10;
let edges = vec![
Edge {
src: 0,
dest: 1,
weight: 35,
},
Edge {
src: 0,
dest: 3,
weight: 20,
},
Edge {
src: 1,
dest: 3,
weight: 10,
},
Edge {
src: 1,
dest: 4,
weight: 50,
},
Edge {
src: 2,
dest: 3,
weight: 22,
},
Edge {
src: 2,
dest: 6,
weight: 8,
},
Edge {
src: 3,
dest: 4,
weight: 12,
},
Edge {
src: 3,
dest: 7,
weight: 5,
},
Edge {
src: 4,
dest: 5,
weight: 30,
},
Edge {
src: 4,
dest: 8,
weight: 30,
},
Edge {
src: 5,
dest: 9,
weight: 9,
},
Edge {
src: 6,
dest: 7,
weight: 60,
},
Edge {
src: 7,
dest: 8,
weight: 8,
},
Edge {
src: 8,
dest: 9,
weight: 16,
},
];
kruskal_mcst(vertices, edges);
}
Sample Output
Edges in the constructed MCST:
V4 -- V8 == 5
V3 -- V7 == 8
V8 -- V9 == 8
V6 -- V10 == 9
V2 -- V4 == 10
V4 -- V5 == 12
V9 -- V10 == 16
V1 -- V4 == 20
V3 -- V4 == 22
Minimum Spanning Tree Cost: 110
Question 3
Problem Statement
Analyze the performance of both algorithms on different problem instances and write a brief report.
Explanation / Approach
This report provides an analytical comparison of Kruskal’s and Prim’s algorithms for finding a Minimum Cost Spanning Tree (MCST). While both guarantee an optimal minimum spanning tree, their architectural designs perform differently depending on the structural density and representation of the input graph.
Algorithmic Approaches & Data Structures
The core performance differences stem from how each algorithm traverses the graph and what data structures manage its state.
Kruskal’s Algorithm
- Strategy: Edge-centric greedy approach. It processes the entire graph globally, selecting the lightest available edges regardless of connectivity.
- Core Mechanisms:
- Array sorting or a min-heap to order the edges.
- Disjoint-Set (Union-Find) data structure with path compression and union-by-rank to prevent cycle formation.
Prim’s Algorithm
- Strategy: Vertex-centric greedy approach. It starts at a single root vertex and grows the tree continuously outward like a single component.
- Core Mechanisms:
- Tracking of structural weights via a fringe/distance array.
- Priority Queue (Min-Heap or Fibonacci Heap) to continually discover the closest unvisited neighbor.
Recommendations
- Choose Kruskal’s Algorithm when: The problem involves a sparse graph, edge information is already sorted or easily structured, or you are reading from an edge-list representation. It is highly intuitive to implement and has a small memory footprint for standard workloads.
- Choose Prim’s Algorithm when: The problem involves a dense graph, or you are handling a map matrix layout where vertex boundaries dictate constraints. When optimized with advanced heaps, Prim's offers unparalleled performance metrics for dense network topographies.